Mechatronics Case Study: Lunar Rover Sensors and Actuators
Problem statement
The aim is to design a lunar rover to explore the surface of the Moon and send back useful data for a period of a year. Different sensors and actuators are to be applied to the rover to receive useful information about the rover’s exploration. There are many types of sensors and actuators and only a specific set of sensors and actuators are suitable for the moon’s environment. The sensors are the ‘eyes’ the actuators are the ‘muscles’ of the system. We are investigating sensors and actuators and finding specific sensors and actuators that would be beneficial to add to the lunar rover leaving out any that aren’t essential.
Using the information obtained through investigation, decisions are made, applying sensors and actuators that are required into the lunar rover leaving out any unnecessary equipment.
The purpose is to have a good understanding of actuators and sensors used, to know what is appropriate for a device such as a lunar rover.
Lunar Rover Design Requirements:
Types of Sensors and Actuators
Passive sensors
By using resistive sensors, we can calculate voltage. Finding the voltage is important to monitor the battery life of the lunar rover. By using a passive sensor to find the voltage, no external power is required for this sensor.
Active sensors
Vibration sensor: Machinery produce vibrations, which can indicate the health of the contraption. With vibration analysis, a tool to determine a machine’s condition, the vibration sensors can determine the lunar rover’s condition as well as locate problems or areas requiring repairs.
(Reference: 9,10)
Solar Radiation Sensor: It would detect when it’s under direct sunlight allowing the rover to recharge using solar panel/panels from the sun’s rays.
Types of Digital Sensors
Having a digital limit switch prevents the lunar rover traveling past an allocated point as it acts like a proximity sensor.
Between the two digital optical encoders incremental and absolute encoder, absolute encoders are better as it can remember the datum point even when the device is reset.
Digital Accelerometer: To detect change in position, velocity, and orientation. To monitor the location, speed of the rover as well as orientation in case the rover happens to topple over.
Actuators
Actuators are required for the wheels and the robotic arm that will be used to collect samples for the lunar rover. For the wheels I have selected the Brushless DC motors. Brushless DC Motors require little maintenance, they are more reliable and easier to control.
As for the robotic arm, I would use servo motors as they have fast response, high accuracy and they provide feedback automatically.
For steering, an electronic actuator is used, which is called electronic power-assisted steering (EPAS) actuator for short. This actuator uses brushless motor, gearing and programmable electronic motor controller to steer. This type of actuator makes it possible to have the lunar rover remote controlled without any astronauts taking control of the rover.
Robotic arm selection
Using an electrical actuating system is more useful for the lunar rover other than a hydraulic or pneumatic system because it’s advantages are ideal for the lunar rover. Electrical actuators can be reprogrammed quickly and provide complete control and immediate feedback for diagnostic and maintenance. Out of the electrical actuators AC servomotors require little maintenance, don’t produce electrical noise which would be suitable for the robotic arm.
Below is an example of the type of robotic arm that will be used for the lunar rover.
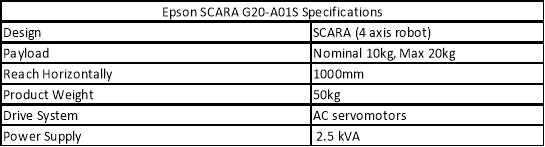
Figure 1
You have to be 100% sure of the quality of your product to give a money-back guarantee. This describes us perfectly. Make sure that this guarantee is totally transparent.
Read moreEach paper is composed from scratch, according to your instructions. It is then checked by our plagiarism-detection software. There is no gap where plagiarism could squeeze in.
Read moreThanks to our free revisions, there is no way for you to be unsatisfied. We will work on your paper until you are completely happy with the result.
Read moreYour email is safe, as we store it according to international data protection rules. Your bank details are secure, as we use only reliable payment systems.
Read moreBy sending us your money, you buy the service we provide. Check out our terms and conditions if you prefer business talks to be laid out in official language.
Read more